Tuned Mass Dampers in Skyscrapers
In many of the world’s tallest skyscrapers, there’s a secret device protecting the building and the people inside from strong motion due to wind and earthquakes. Did you know you can tune a skyscraper just like a guitar?
Sometimes to the detriment of the hedge fund managers and penthouse denizens on on the top floors, a skyscraper can act as a oscillator just like a guitar string. Wind can induce oscillation in a building similar to a tie down strap on a vehicle. A strong earthquake can also excite the building’s resonant frequency just like plucking a guitar string. In most cases, the movement is not enough to threaten the safety of the building itself. All structures exhibit some level of deflection, since strength doesn’t necessary equal rigidity. On a very breezy day, the tallest skyscrapers can sway up to three feet on each side. The building may be fine, but that amount of movement can be profoundly uncomfortable to its occupants.

Most of us hold an intrinsic belief that buildings should not move. We don’t even think about it. For our entire lives Wednesday has come after Tuesday, the sun has risen in the east, and our domiciles and dwellings have remained static beneath our feet. So you can forgive your subconscious for feeling some amount of terror when such a fundamental belief is shaken, especially when the shaking is literal. It may not be enough to harm the building’s structure, but it’s certainly enough to cause a one-percenter on the top floor to lose his caviar, and buildings aren’t good for much if people don’t want to be inside them.
So engineers have come up with some novel solutions for minimizing this unwelcome vacillation, one of which is the tuned mass damper, or TMD. A TMD reduces the amplitude of vibration by absorbing kinetic energy from the system, in this case the swaying motion of a tall building. For a long time, TMDs were relegated to areas with the rest of the building’s mechanical equipment, hidden from public view. That changed in 2004 when the TAIPEI 101 tower finished construction in Taiwan. Rather than hide the world’s largest spherical tuned mass damper, the building’s designers chose to open it to the public. TAIPEI 101’s TMD has become a draw for tourists, and even has its own mascot, the damper baby, which, looks like it came straight off island of misfit mascots. It’s like clippy the paperclip had a child with the twitter fail whale. Anyway, the publicity associated with the Taipei 101 has sort of unveiled this really cool bit of engineering that is the tuned mass damper, and you can find tons of videos of it in action online, including its movements during the 2008 Sichuan Earthquake in China. So how does it work?
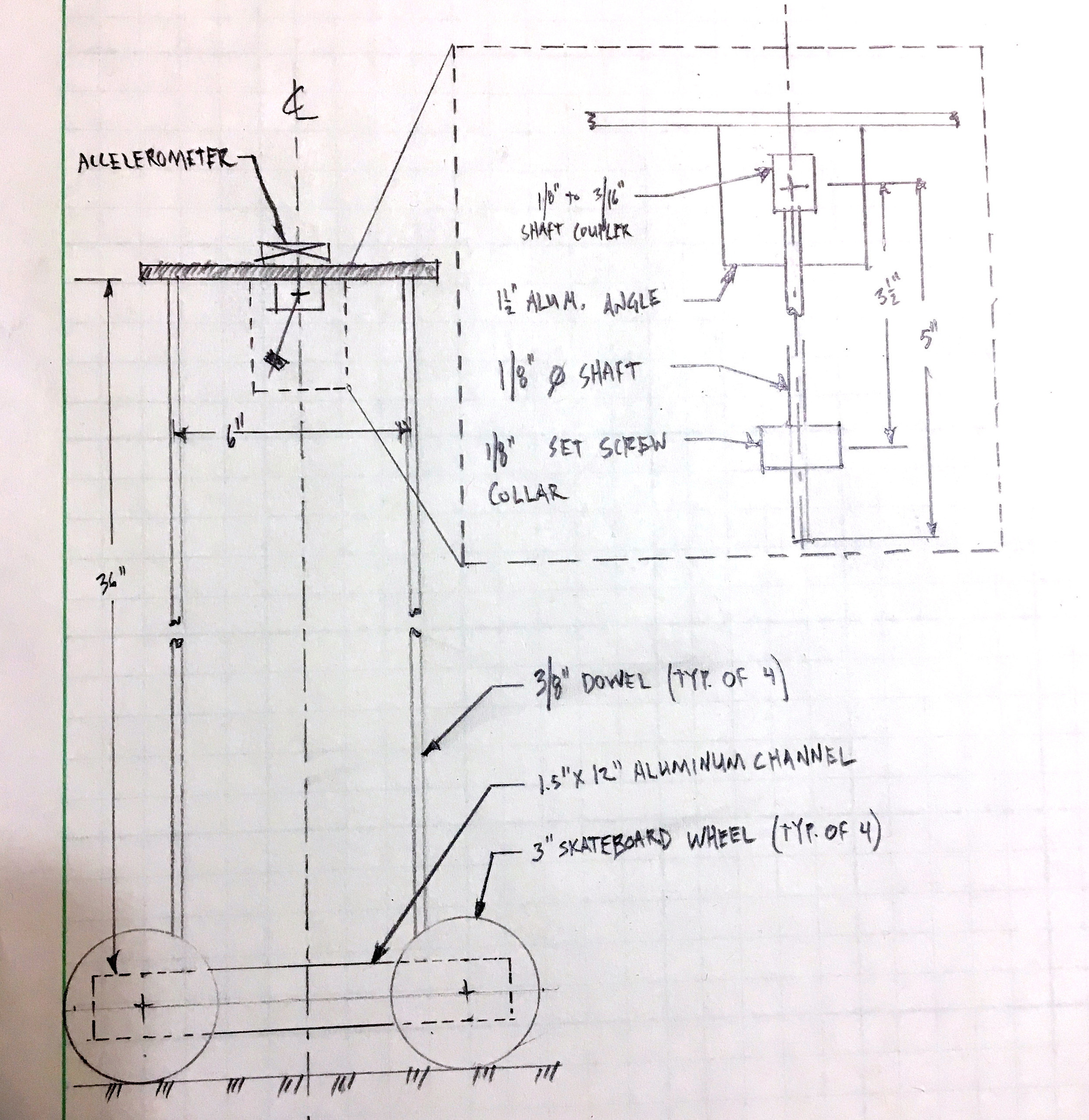
I’ve constructed this model of a pendulum-style tuned mass damper in a skyscraper (Note: Some of the dimensions in the drawing may not reflect the final configuration of my model. E.g. I ended up using 1/4" dowels in place of the 3/8" dowels shown on the drawing. You may have to iterate the design to get the proper motion.) I can pull the cart back and give the building a bump which excites its resonant frequency just like an earthquake or strong wind event. The benefit here is that I can do it in a somewhat repeatable fashion so we can evaluate the effectiveness of the damper. For the TMD, the damping comes from the tension of the screw which is acting as the hinge. I can tighten the screw to increase the damping. The tuning comes from moving this mass up or down on the pendulum shaft. This changes frequency of the pendulum just like a metronome, which can be tuned to the resonant frequency of the building. I have an accelerometer on top of the building so we can measure its movements, and this hooked to an Arduino clone which is sending the data to my laptop. The accelerometer I used is the ADXL345 breakout board from Sparkfun. I filtered the x-axis data with a low-pass filter, then sent it via serial port to my laptop. I just copy the data from the serial monitor window and import into Microsoft Excel for the figures. For the figure animations, I wrote a custom macro and used a screenshot program to capture them as video.

If I lock the pendulum and set the building swaying, we can get a sense of how the it would perform with only the building’s own natural damping. Plotting the acceleration response, we can see that the model experienced a maximum amplitude of 4 m/s^2 or about half a gee, with period of 0.6 seconds. Frequency is the inverse of period, so we can get the building’s fundamental frequency, 1.7 hertz. We can also see that the building has some natural damping just due to the internal friction in its movement - otherwise it would sway indefinitely. We can estimate the model’s natural damping ratio using the logarithmic decrement between the first and second peaks. I get a damping ratio of 0.01.
The damping ratio, denoted by one of the tougher greek letters to draw, ζ (small zeta), is a measure of how quickly the amplitude decays in an oscillating system. Systems with a damping ratio greater than 1 are said to be overdamped, because the system returns to equilibrium without oscillating. Systems with a damping ratio less than 1 are said to be underdamped, since they experience some oscillation. If the damping coefficient is exactly 1, the system is critically damped and returns to equilibrium as quickly as possible, and if the system is undamped, the oscillation continues indefinitely.

Now that we know an approximate natural frequency of the building, we can introduce the pendulum damper. You may remember from your physics classes that a pendulum’s frequency depends on its length. For a frequency of around 1.7 hertz, my pendulum needs to be approximately 3.5 inches long. Now let’s try the exact same experiment with the pendulum able to swing freely. The kinetic energy of the building does get transferred to the pendulum at first, but because there’s no damping, the pendulum transfers the energy right back into the building. So instead of reducing the amplitude, instead the pendulum just continuously swaps the kinetic energy with the building like a hot potato. The pendulum is reducing the amplitude of acceleration, but you can only imagine that this erratic behavior would be even more alarming to our topmost tenants than than steady but slowly decaying motion of the previous example.
Now let’s tighten the screw to add some damping to the pendulum and see what happens. You can see a remarkable difference in the performance. The plot of acceleration response shows a peak acceleration of about 3.5 m/s^2, so a reduction of only about 12%. But the big difference is how quickly the motion decays. At the beginning when the pendulum is swinging, I calculated a damping ratio of over 0.06. That’s about 6 times more damping than without the TMD. Once the pendulum stops swinging, the rest of the swaying follows the approximate natural damping ratio of the building itself, as expected, but the majority of the kinetic energy has already been dissipated by the damper, so the amplitude is much lower.

As silly as this little experiment looks, it’s actually not that far off from what engineers do in the real world (maybe without the googly eyes). The design phase for just about every major building includes some physical scale model tests. Even then, the modeled parameters may not be exactly true to the real structure, and may change over the building’s lifetime, so being able to tune the mass damper is a necessity. Of course, a tuned mass damper doesn’t completely eliminate movement, but we saw that it can certainly make a difference. In engineering, you have inexpensive, you have effective, and you have innovative and you usually you get to pick one, sometimes two. For solving the problem of oscillation in tall buildings, though, the tuned mass damper is truly all three, a great example of elegance in engineering.

I hope you liked the first practical engineering video, and if you did, I would really appreciate it if you subscribe to the channel. That helps motivate me to keep making cool stuff. If you want more details, have a question, or a suggestions for a topic, and especially if you live or work at the top of a skyscraper, I would really love to hear from you in the comments.
Random Addenda
The damper in my model did not have "ideal" behavior since the force was not proportional to velocity. The coulomb damping, or dry friction damping, created with the screw tension in the video creates a stepwise function. It behaves one way under kinetic friction and another under static friction. A more ideal damper would use viscous or electrical/magnetic damping. I went through quite a few ideas (magnetic damping, off the shelf rotary damper, RC car shock absorber, etc.) but it is really hard to get ideal behavior at the scale I was working. I ultimately abandoned rigor in favor of just getting the point across.